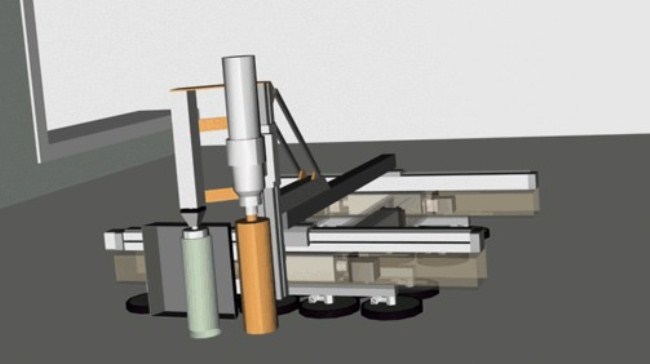
Am Institut für Technologie und Management im Baubetrieb (TMB) an der TH Karlsruhe wurden in den letzten Jahren Grundlagenversuche zur Entwicklung eines autark arbeitenden Manipulators für Dekontaminationsarbeiten (AMANDA) durchgeführt. Es handelt sich hierbei um ein fernbedientes Trägersystem, das ohne Hilfssysteme unter Nutzung der Vakuumtechnologie auf unterschiedlichen Untergründen in konventionellen und nuklearen Bereichen eingesetzt werden kann. Der Manipulator wurde in der Grundversion für das Mitführen und den Oberflächenabtrag mit einer Fräse ausgelegt.
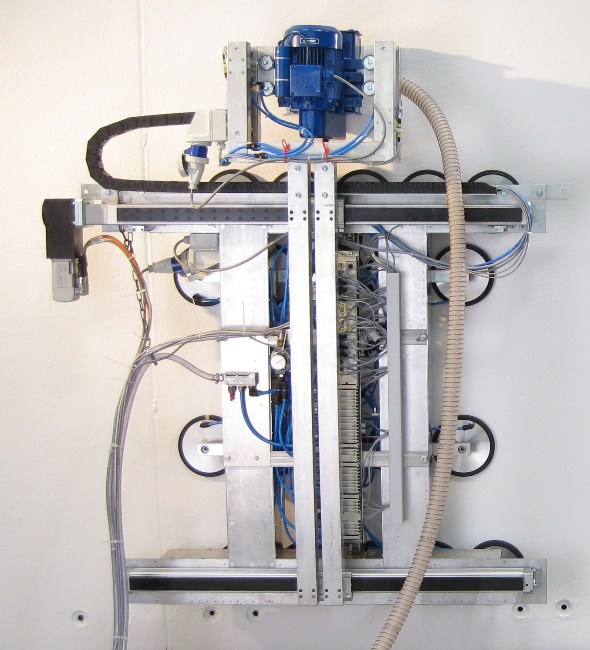
Autark kletternder Manipulator
- Der autark kletternde Manipulator AMANDA I ist ein Arbeitsgerät für Dekontaminationsarbeiten an Wänden und Decken.
- Moderne Vakuumtechnologie sorgt dabei für einen sicheren Verbund zwischen dem Manipulator und dem zu bearbeitenden Objekt.
- Einsatzschwerpunkt von AMANDA I ist der Rückbau kerntechnischer Anlagen.
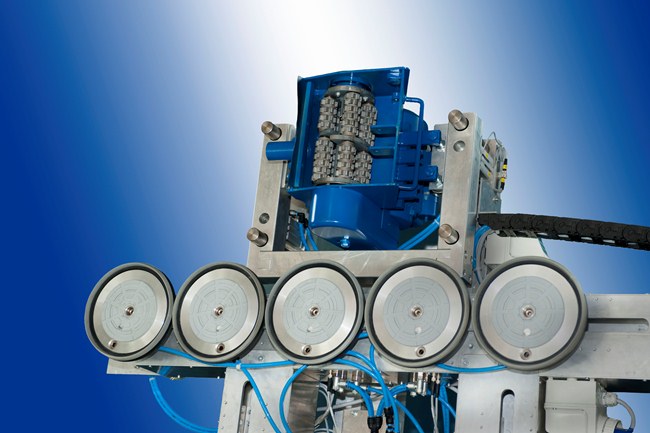
Arbeitskopf des Manipulators

- Um die Oberflächen den Anforderungen entsprechend abtragen zu können, ist das Trägersystem mit einer Fräse ausgestattet.
Vorteile des Manipulators
- Flexibel einsetzbar
- Kompakt und Bedarfsgenau
- Anbaugerät wählbar (z.B. Fräse, Kernbohrer, etc.)
- Minimierter Personaleinsatz
- Komplett fernsteuerbar
- Kostenreduzierung durch Entfall von Rüstungen
- Besonders geeignet für große und hohe Räume
Technische Daten des Manipulators

|
1,30 m x 1,30 m |
|
ca. 290 kg |
|
6 m² bis 8 m², je nach Bewegungsmuster |
|
1 Bediener |
|
Druckluft Fräse 200 m³/h Ejektor 11 m³/h Stromversorgung 400 V |
|
Saugplatten - robust, einfacher Wechsel Fräslamellen – minimierter Abfall |