
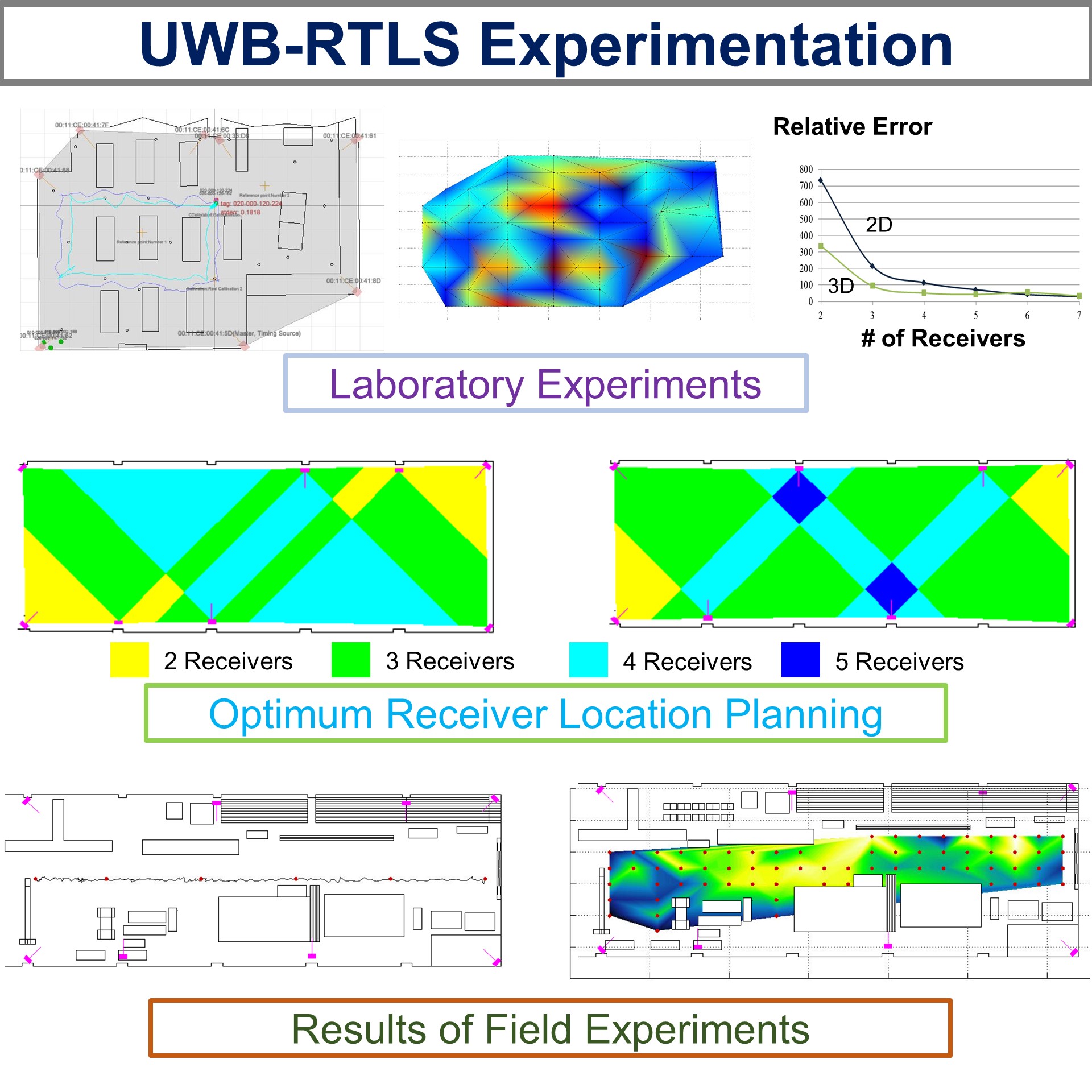
 Dieses Forschungsprojekt befasst sich mit dem Einsatz von Echtzeit-Standortbestimmungssystemen (RTLS) auf Baustellen zur Automatisierung des Sicherheitsmanagements. Die Automatisierung des Sicherheitsmanagements auf Baustellen durch die Echtzeitverfolgung von Ressourcen ist von entscheidender Bedeutung, da die Risiken im Zusammenhang mit häufigen tödlichen Unfällen auf Baustellen, wie Abstürzen und Kollisionen, durch die derzeitigen Sicherheitsrichtlinien und manuellen Überwachungspraktiken nicht merklich verringert werden konnten. Ein aktuelles Wissen über den Standort der Ressourcen kann auch die zusätzliche Suche nach verlegten Gegenständen minimieren und in der Folge den Diebstahl von Geräten und Maschinen aufdecken. Vor allem die Genauigkeit des RTLS ist ein wichtiger Faktor für die Zuverlässigkeit des gesamten Systems. Viele Faktoren, wie z. B. die Anzahl der Tags, die Anzahl der Empfänger, die Geschwindigkeit und die Entfernung, wirken sich auf die Genauigkeit der Standortbestimmung mit RTLS aus. Daher ist eine umfassende experimentelle Analyse der Genauigkeit dieser Systeme erforderlich. Einige der Ergebnisse für UWB-RTLS sind in der Abbildung links visuell dargestellt, die den Ergebnissen von Maalek et al. (2013) und (2016) entnommen sind
Dieses Forschungsprojekt befasst sich mit dem Einsatz von Echtzeit-Standortbestimmungssystemen (RTLS) auf Baustellen zur Automatisierung des Sicherheitsmanagements. Die Automatisierung des Sicherheitsmanagements auf Baustellen durch die Echtzeitverfolgung von Ressourcen ist von entscheidender Bedeutung, da die Risiken im Zusammenhang mit häufigen tödlichen Unfällen auf Baustellen, wie Abstürzen und Kollisionen, durch die derzeitigen Sicherheitsrichtlinien und manuellen Überwachungspraktiken nicht merklich verringert werden konnten. Ein aktuelles Wissen über den Standort der Ressourcen kann auch die zusätzliche Suche nach verlegten Gegenständen minimieren und in der Folge den Diebstahl von Geräten und Maschinen aufdecken. Vor allem die Genauigkeit des RTLS ist ein wichtiger Faktor für die Zuverlässigkeit des gesamten Systems. Viele Faktoren, wie z. B. die Anzahl der Tags, die Anzahl der Empfänger, die Geschwindigkeit und die Entfernung, wirken sich auf die Genauigkeit der Standortbestimmung mit RTLS aus. Daher ist eine umfassende experimentelle Analyse der Genauigkeit dieser Systeme erforderlich. Einige der Ergebnisse für UWB-RTLS sind in der Abbildung links visuell dargestellt, die den Ergebnissen von Maalek et al. (2013) und (2016) entnommen sindUWB-RTLS-Architektur:
Aufgrund der dynamischen und sich ständig ändernden Baustellenbedingungen werden RTLS-Technologien auf Funkfrequenzbasis (RF) im Allgemeinen gegenüber laserbasierten oder ultraschallbasierten Entfernungsmesssystemen bevorzugt, da sie Wände und Objekte durchdringen können. Von den verschiedenen RF-basierten Technologien und Standards wie WLAN, ZigBee, GPS und Ultrabreitband (UWB) wird erwartet, dass UWB aufgrund einer größeren (breiteren) Frequenzbandbreite eine genauere Standortbestimmung ermöglicht. Diese größere Bandbreite ermöglicht die Unterscheidung zwischen dem LOS-Signal (dem direkten Signal zwischen dem Tag und dem Empfänger) und den Mehrwegsignalen (Signale, die von den umgebenden Oberflächen reflektiert werden), was wiederum bessere Möglichkeiten für eine genauere Standortbestimmung bietet.
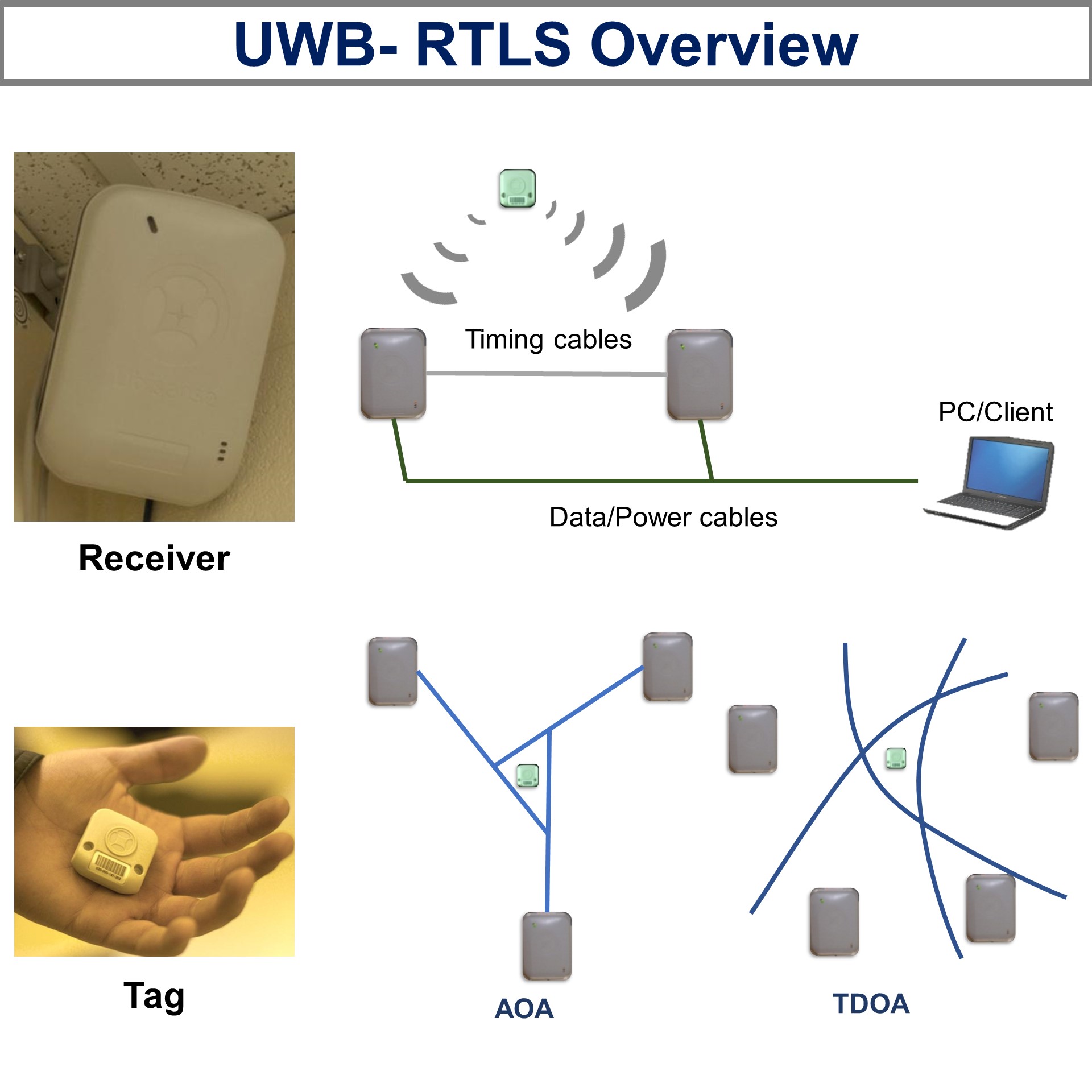 RF-basierte RTLS-Systeme bestehen in der Regel aus kleinen Tags, die an Objekten (in unserem Fall Baumaschinen und Arbeiter) angebracht werden, und Empfängern, die in der Regel an vorher festgelegten Orten auf der Baustelle angebracht werden (außer im Fall von GPS, wo die Empfänger mit Satelliten in der Umlaufbahn kommunizieren). Die Tags kommunizieren mit den Empfängern, die dann relevante Daten (z. B. die Ankunftszeit (TOA) oder den Ankunftswinkel (AOA) des LOS-Signals) für die Standortbestimmung sammeln. Wenn das vom Tag ausgesendete Signal die erforderliche Mindestanzahl von Empfängern erreicht, kann der Standort des Tags geschätzt werden. Die Mindestanzahl von Empfängern hängt von der Art der LOS-Daten ab, die die Empfänger vom Tag sammeln. Für TOA und AOA werden beispielsweise drei bzw. zwei Empfänger benötigt, um die kartesischen 3D-Koordinaten des Tags relativ zum Koordinatensystem der Empfänger zu schätzen
RF-basierte RTLS-Systeme bestehen in der Regel aus kleinen Tags, die an Objekten (in unserem Fall Baumaschinen und Arbeiter) angebracht werden, und Empfängern, die in der Regel an vorher festgelegten Orten auf der Baustelle angebracht werden (außer im Fall von GPS, wo die Empfänger mit Satelliten in der Umlaufbahn kommunizieren). Die Tags kommunizieren mit den Empfängern, die dann relevante Daten (z. B. die Ankunftszeit (TOA) oder den Ankunftswinkel (AOA) des LOS-Signals) für die Standortbestimmung sammeln. Wenn das vom Tag ausgesendete Signal die erforderliche Mindestanzahl von Empfängern erreicht, kann der Standort des Tags geschätzt werden. Die Mindestanzahl von Empfängern hängt von der Art der LOS-Daten ab, die die Empfänger vom Tag sammeln. Für TOA und AOA werden beispielsweise drei bzw. zwei Empfänger benötigt, um die kartesischen 3D-Koordinaten des Tags relativ zum Koordinatensystem der Empfänger zu schätzen