
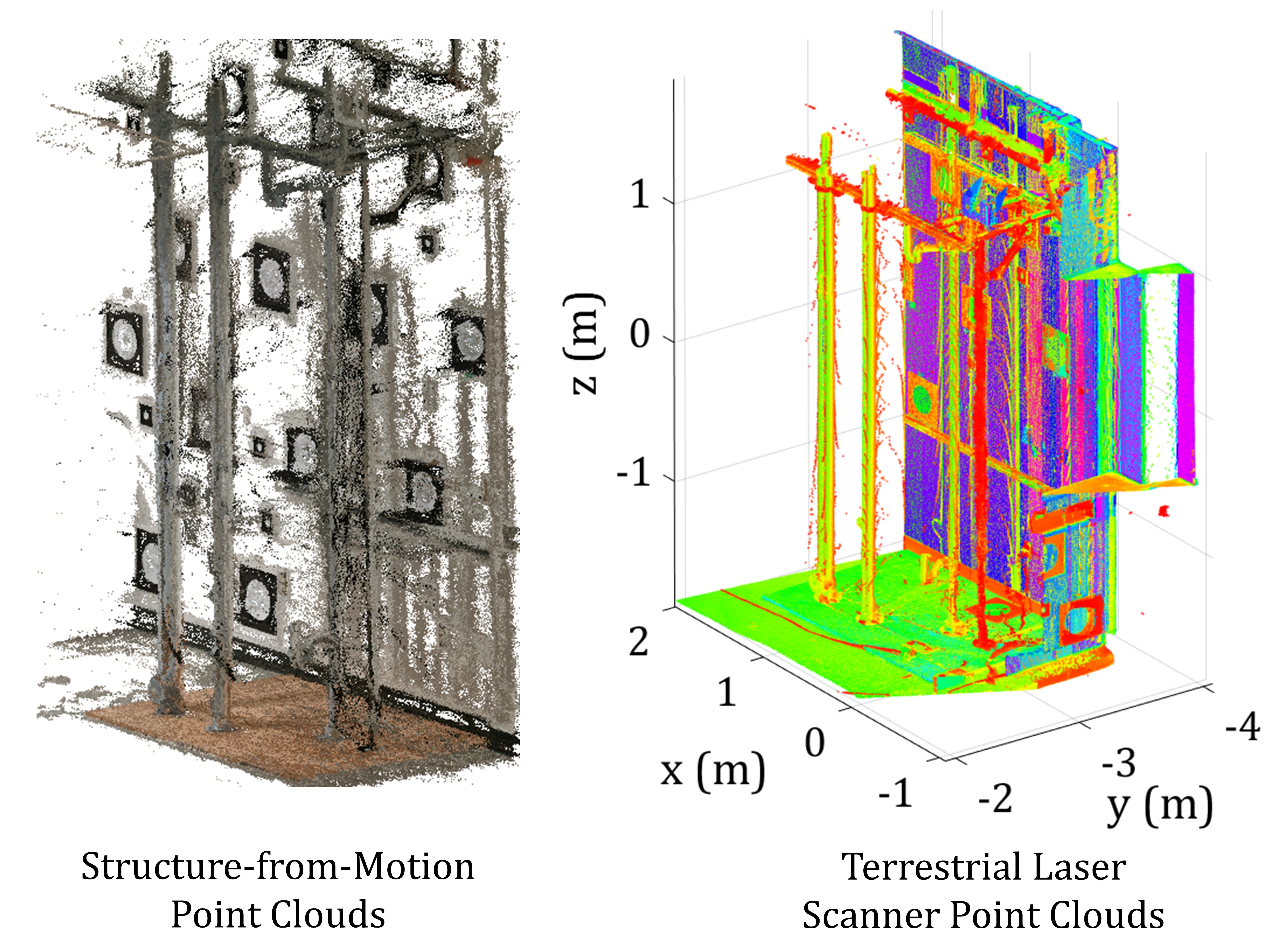
 Dieses Forschungsprojekt konzentriert sich auf die Entwicklung neuer Methoden und Rahmenwerke zur automatischen Verarbeitung von Punktwolken, die bei Bauprojekten erfasst werden. Punktwolken liefern 3D-Darstellungen der Oberfläche von Objekten, die auf Baustellen gebaut werden. Diese Informationen können für die geometrische digitale Zwillingsmodellierung des Ist-Zustandes, die Überwachung des Baufortschritts, die Überwachung des baulichen Zustands, die Qualitätskontrolle und die Bewertung von Oberflächenfehlern genutzt werden. Punktwolken können mit verschiedenen Mitteln erfasst werden, z. B. mit Laserscannern und überlappenden Bildern. Die Punktwolke kann auch stationär erfasst werden, z. B. mit terrestrischen Laserscannern (TLS), oder dynamisch mit mobilen Geräten, z. B. durch Drohnenaufnahmen. In beiden Fällen ist es auch möglich, den Prozess der Erfassung von Punktwolken durch die Integration von Robotern (z. B. selbstfahrenden Robotern) zu automatisieren. Das Bild auf der linken Seite zeigt eine visuelle Darstellung von Punktwolken, die von derselben Szene mit überlappenden Bildern durch Structure-from-Motion (SfM) und TLS erfasst wurden
Dieses Forschungsprojekt konzentriert sich auf die Entwicklung neuer Methoden und Rahmenwerke zur automatischen Verarbeitung von Punktwolken, die bei Bauprojekten erfasst werden. Punktwolken liefern 3D-Darstellungen der Oberfläche von Objekten, die auf Baustellen gebaut werden. Diese Informationen können für die geometrische digitale Zwillingsmodellierung des Ist-Zustandes, die Überwachung des Baufortschritts, die Überwachung des baulichen Zustands, die Qualitätskontrolle und die Bewertung von Oberflächenfehlern genutzt werden. Punktwolken können mit verschiedenen Mitteln erfasst werden, z. B. mit Laserscannern und überlappenden Bildern. Die Punktwolke kann auch stationär erfasst werden, z. B. mit terrestrischen Laserscannern (TLS), oder dynamisch mit mobilen Geräten, z. B. durch Drohnenaufnahmen. In beiden Fällen ist es auch möglich, den Prozess der Erfassung von Punktwolken durch die Integration von Robotern (z. B. selbstfahrenden Robotern) zu automatisieren. Das Bild auf der linken Seite zeigt eine visuelle Darstellung von Punktwolken, die von derselben Szene mit überlappenden Bildern durch Structure-from-Motion (SfM) und TLS erfasst wurden
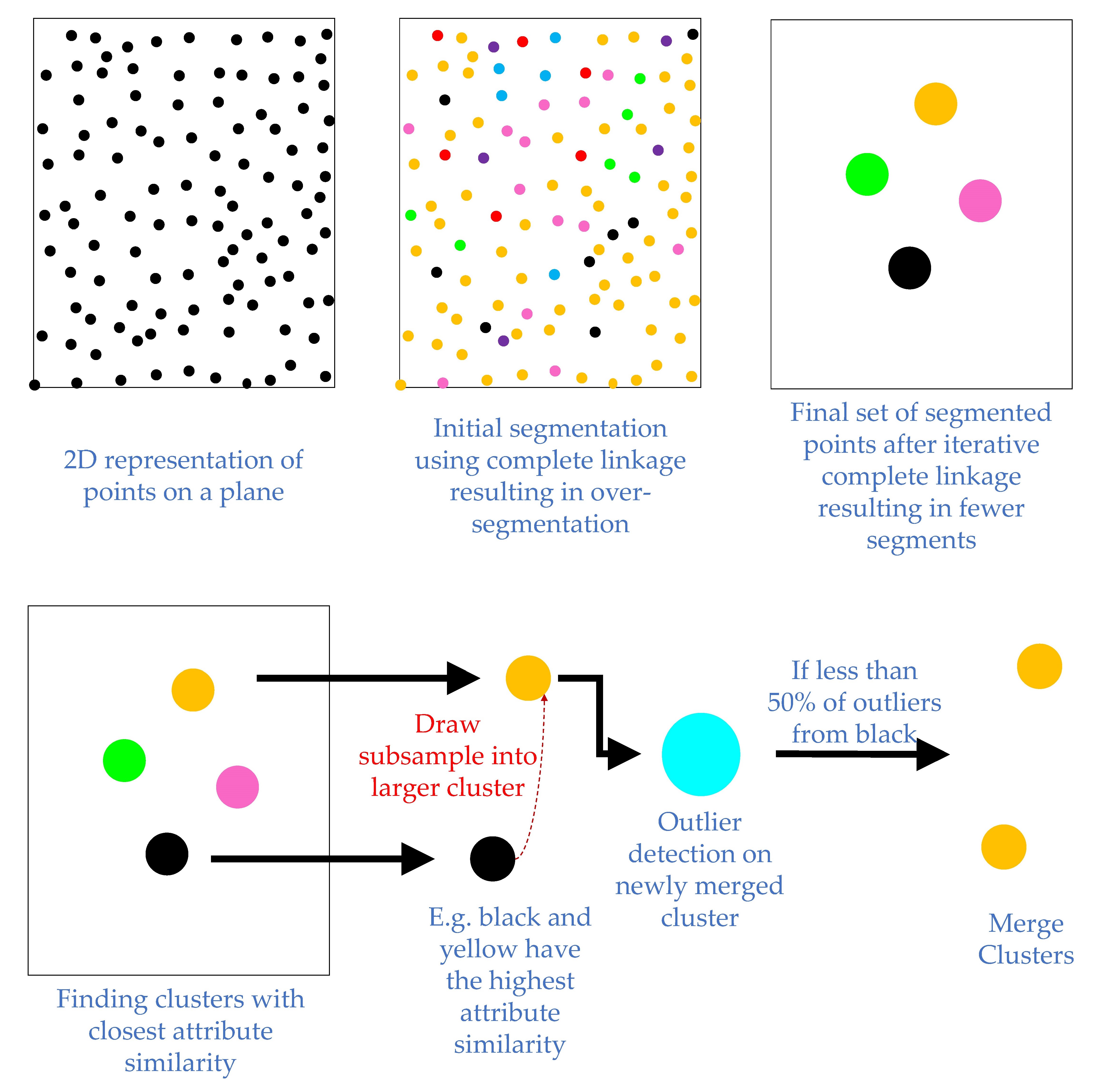 Um Punktwolken ausschließlich mit geometrischen Primitiven zu analysieren, müssen zunächst die Arten von Oberflächengeometrien festgelegt werden, die automatisch extrahiert werden sollen. So sind beispielsweise ebene und zylindrische Oberflächen gängige analytische Geometrien, die viele Baustellenelemente wie Säulen, Platten und Rohre charakterisieren. Sobald die gewünschte Klasse der Oberflächengeometrie festgelegt ist, umfasst der Prozess in der Regel die Klassifizierung von Punkten in die definierte Klasse (z. B. alle Punkte, die planar sind). Die klassifizierten Punkte werden weiter unterteilt, um Punkte der gleichen Oberfläche durch eine gewisse attributive Ähnlichkeit zu gruppieren (segmentiert) (z. B. alle Punkte, die zu einer ebenen Oberfläche gehören). Die Attribute können auf verschiedene Weise geschätzt werden, z. B. durch eine lokale Krümmungsanalyse und eine robuste Oberflächenanpassung nach der Methode der kleinsten Quadrate. Die Gruppierung der Punkte kann auch durch Regionsbildung ausgehend von einem Startpunkt, durch Clustering oder durch eine Kombination dieser Methoden (Hybrid) erfolgen. Diese Segmentierungsstrategien haben ihre Vor- und Nachteile. So sind beispielsweise Methoden des Regionswachstums im Allgemeinen nicht permutationsinvariant und anfällig für den Verkettungseffekt (der durch die Skalierung der Oberfläche beeinflusst wird). Clustering-Methoden hingegen erfordern skaleninvariante Attribute sowie szeneninvariante Schwellenwerte für die Gruppierung von Punkten mit ähnlichen Attributen. Die Abbildung links zeigt schematisch ein erfolgreiches Verfahren für die robuste und szeneninvariante Zusammenführung von Clustern (Maalek et. al 2018)
Um Punktwolken ausschließlich mit geometrischen Primitiven zu analysieren, müssen zunächst die Arten von Oberflächengeometrien festgelegt werden, die automatisch extrahiert werden sollen. So sind beispielsweise ebene und zylindrische Oberflächen gängige analytische Geometrien, die viele Baustellenelemente wie Säulen, Platten und Rohre charakterisieren. Sobald die gewünschte Klasse der Oberflächengeometrie festgelegt ist, umfasst der Prozess in der Regel die Klassifizierung von Punkten in die definierte Klasse (z. B. alle Punkte, die planar sind). Die klassifizierten Punkte werden weiter unterteilt, um Punkte der gleichen Oberfläche durch eine gewisse attributive Ähnlichkeit zu gruppieren (segmentiert) (z. B. alle Punkte, die zu einer ebenen Oberfläche gehören). Die Attribute können auf verschiedene Weise geschätzt werden, z. B. durch eine lokale Krümmungsanalyse und eine robuste Oberflächenanpassung nach der Methode der kleinsten Quadrate. Die Gruppierung der Punkte kann auch durch Regionsbildung ausgehend von einem Startpunkt, durch Clustering oder durch eine Kombination dieser Methoden (Hybrid) erfolgen. Diese Segmentierungsstrategien haben ihre Vor- und Nachteile. So sind beispielsweise Methoden des Regionswachstums im Allgemeinen nicht permutationsinvariant und anfällig für den Verkettungseffekt (der durch die Skalierung der Oberfläche beeinflusst wird). Clustering-Methoden hingegen erfordern skaleninvariante Attribute sowie szeneninvariante Schwellenwerte für die Gruppierung von Punkten mit ähnlichen Attributen. Die Abbildung links zeigt schematisch ein erfolgreiches Verfahren für die robuste und szeneninvariante Zusammenführung von Clustern (Maalek et. al 2018)