
Autonomous Robotic Networks to Help Modern Societies (ARCHES)
- Ansprechperson:
- Projektbeteiligte:
Deutschen Zentrums für Luft- und Raumfahrt (DLR)
GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel (GEOMAR)
- Starttermin:
01.01.2018
- Endtermin:
31.12.2020
Im Rahmen der Ausschreibung Zukunftsthemen - Impulse für strategische Zukunftsfelder der Helmholtz-Gemeinschaft wurde das Forschungsprojekt ARCHES bewilligt. Projektpartner sind das Deutsche Zentrum für Luft- und Raumfahrt (DLR), das Helmholtz-Zentrum für Ozeanforschung (GEOMAR) und das Alfred-Wegener-Institut (AWI).
Ziel des Konsortiums ist die domänen- und fachübergreifende Erforschung robotischer Schlüsseltechnologien und -methoden, um in Einklang mit der Helmholtz-Mission die Grundlagen für die Lösung der anstehenden gesellschaftlichen Herausforderungen bereitstellen zu können. Mit ARCHES streben wir an, mittels eines Helmholtz-Kompetenznetzwerkes die verschiedenen und bisher noch sehr spezifischen robotischen Entwicklungen von Helmholtz-Forschungsbereichen (Ozean-Exploration und Weltraum-Exploration, sowie weitere potentielle Anwendungszenarien) zu vereinen und dadurch einen Technologiesprung in Deutschland und darüber hinaus zu erarbeiten.
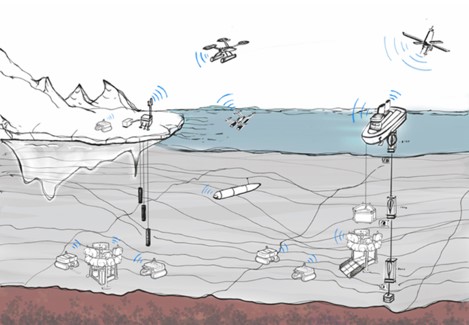
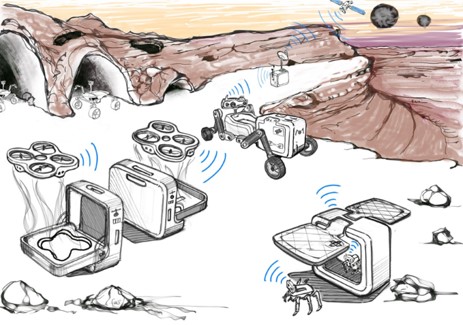
Ozean-Exploration Weltraum-Exploration
In ARCHES sollen Robotersysteme weiterentwickelt und insbesondere auf die Vernetzung von heterogenen Systemen angepasst werden, welche in den zwei Domänen charakteristisch strengen Anforderungen nach Robustheit und Zuverlässigkeit erfüllen können. Durch die Entwicklung von konfigurierbaren Trägersystemen sowie zwischen den Domänen austauschbaren Sensor- und Manipulatormodulen wird das Ziel verfolgt, Synergiepotentiale des Kompetenznetzwerkes optimal zu nutzen. Darüber hinaus wird ein Fokus auf der Erforschung von Methoden für die gemeinsame Analyse und Interpretation von Daten durch die Roboter des Netzwerks liegen. Auch die intelligente Automation und Kooperation der Systeme werden eine zentrale Rolle spielen. Beide Aspekte sind essentiell, da die selbständige Operation des Roboternetzwerks für beide betrachtete Anwendungsmissionen eine Grundvoraussetzung ist. Dementsprechend ergibt sich die Motivation zur Erforschung von Ansätzen für die autonome Navigation in unbekannten Gebieten, die intelligente Interaktion mit der Umwelt, das autarke Energiemanagement und die Selbstorganisation der Kommunikation mit der Missionszentrale und innerhalb des Netzwerks. Für die Interaktion mit dem Menschen muss eine Schnittstelle für die Planung der Mission und die Organisation der Roboter geschaffen werden. Auch in diesen Punkten streben wir in ARCHES domänenübergreifend die Entwicklung gemeinsamer Lösungen und untereinander kompatibler Schnittstellen an.
Durch ARCHES entsteht zudem eine zukünftige Basis, anhand derer weitere Anwendungsfelder in Katastrophenschutz, Medizin und Therapie, Logistik und dem autonomen urbanen Verkehr erschlossen werden können. So kann z.B. ein autonomes Robotertransportnetzwerk langfristig dazu beitragen, die Selbstständigkeit von Individuen sowie die Mobilität und Versorgung einer zunehmend alternden Gesellschaft sicherzustellen.