
Autonomous Robotic Networks to Help Modern Societies (ARCHES)
- Contact:
- Partner:
- Startdate:
01.01.2018
- Enddate:
31.12.2020
The funding of the research project ARCHES is a result of the call for funding of the Helmholtz Society for strategic future fields of research. This project involves partners from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt - DLR), the Helmholtz Centre for Ocean Research (Zentrum für Ozeanforschung - GEOMAR) and the Alfred-Wegener-Institute (AWI).
It is the aim of this consortium to establish multi-domain and multi-disciplinary research of key robotic technologies in line with the mission requirements of the Helmholtz Society, to provide solutions for the social challenges ahead. Within the scope of ARCHES, the project partners from a network of excellence and work to unity the highly specific developments in robotics from various Helmholtz research areas (ocean and space exploration, as well as other potential applications) to achieve a technology leap in Germany and beyond.
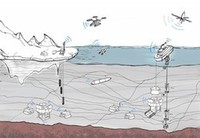
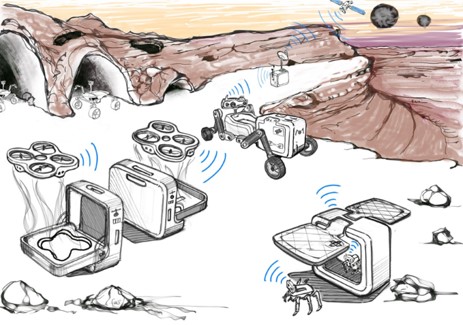
Ocean exploration Space exploration
Robotic systems will be further developed and adapted to work with heterogeneous systems and to fulfill the project’s domains’ specific requirements of robustness and reliability. The synergy potentials of the competency network can be optimally used and exploited by developing configurable carrier systems with interchangeable sensor and manipulator modules. Moreover, there will be an emphasis on developing methods for the common analysis and interpretation of all consortium robot data. Intelligent automation and cooperation of the systems will also be a key issue. Both aspects are essential since the independent operation of the robot network is a prerequisite for both application areas. Therefore, it is the aim to develop approaches for the autonomous navigation in unknown territory, intelligent interaction with the surroundings, independent energy management, as well as self-organizing communication with the mission control and within the network. For the robots to interact with humans, a man-machine-interface for mission planning and robot organization will be required. Within the scope of the ARCHES project, we aim at cross-domain development of joint solutions and compatible interfaces.
ARCHES will also provide the basis for future applications in disaster control, medicine, therapies, logistics, as well as autonomous driving. In this manner, it would be possible for an autonomous robot network to contribute to the independence of individuals, their mobility, and their care in the long-term of an ever-aging society.