
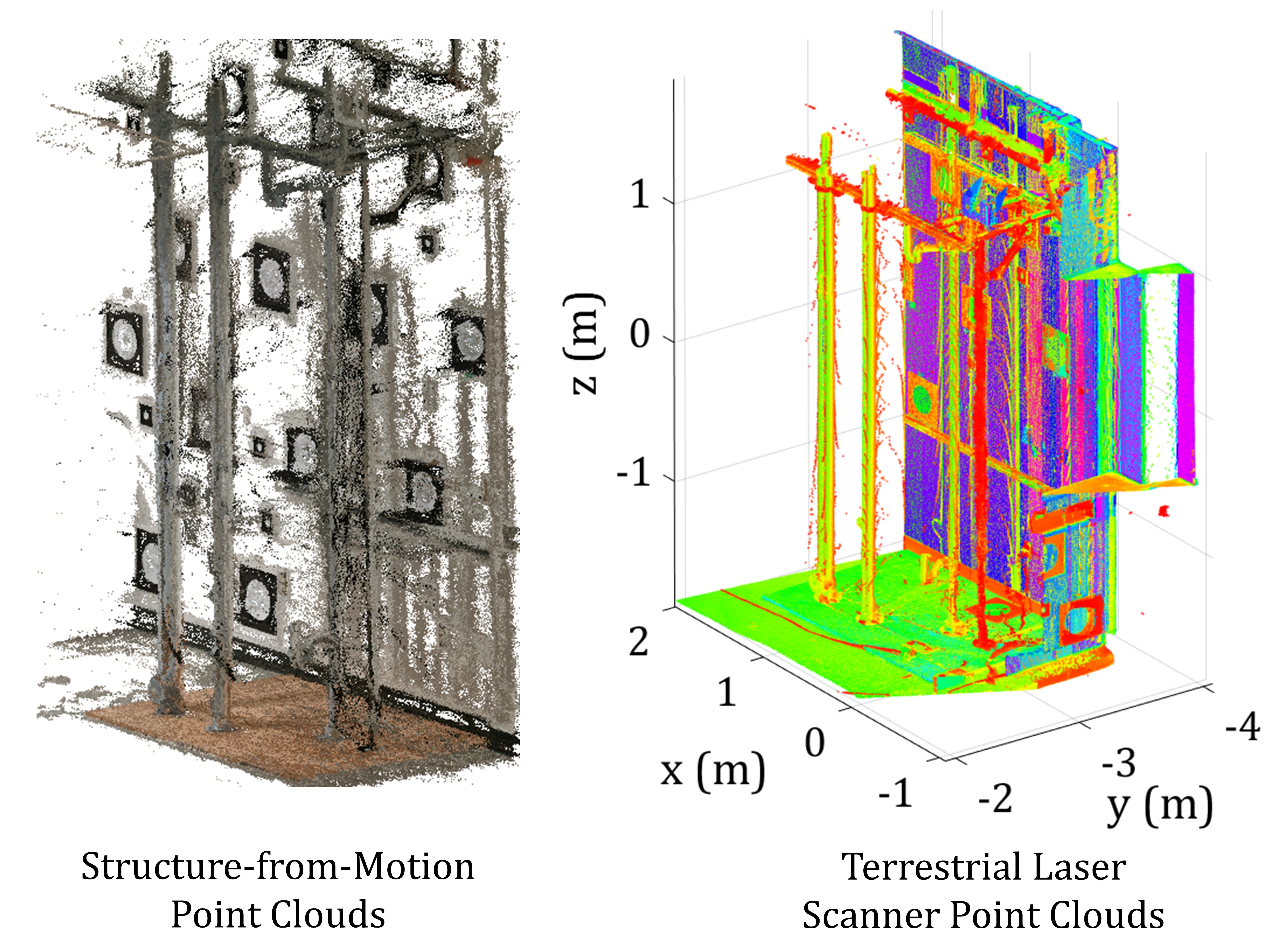
 This research project focuses on the development of new methods and frameworks to automatically process point clouds, acquired from construction projects. Point clouds provide 3D representation of the surface of objects built on construction sites. Such information can be utilized for as-built geometric digital twin modeling, progress monitoring, structural health monitoring, quality control and surface defect assessment. Point clouds can be acquired by different means, such as laser scanners and overlapping images. The point cloud may also be collected at stationary locations, such as in terrestrial laser scanners (TLS), or dynamically using mobile devices, such as drone images. In both cases, it is also possible to automate the process of collection of point clouds through robot integration (e.g., self-driving robots). The image on the left provides a visual representation of point clouds acquired from the same scene using overlapping images through structure-from motion (SfM), and TLS.
This research project focuses on the development of new methods and frameworks to automatically process point clouds, acquired from construction projects. Point clouds provide 3D representation of the surface of objects built on construction sites. Such information can be utilized for as-built geometric digital twin modeling, progress monitoring, structural health monitoring, quality control and surface defect assessment. Point clouds can be acquired by different means, such as laser scanners and overlapping images. The point cloud may also be collected at stationary locations, such as in terrestrial laser scanners (TLS), or dynamically using mobile devices, such as drone images. In both cases, it is also possible to automate the process of collection of point clouds through robot integration (e.g., self-driving robots). The image on the left provides a visual representation of point clouds acquired from the same scene using overlapping images through structure-from motion (SfM), and TLS.
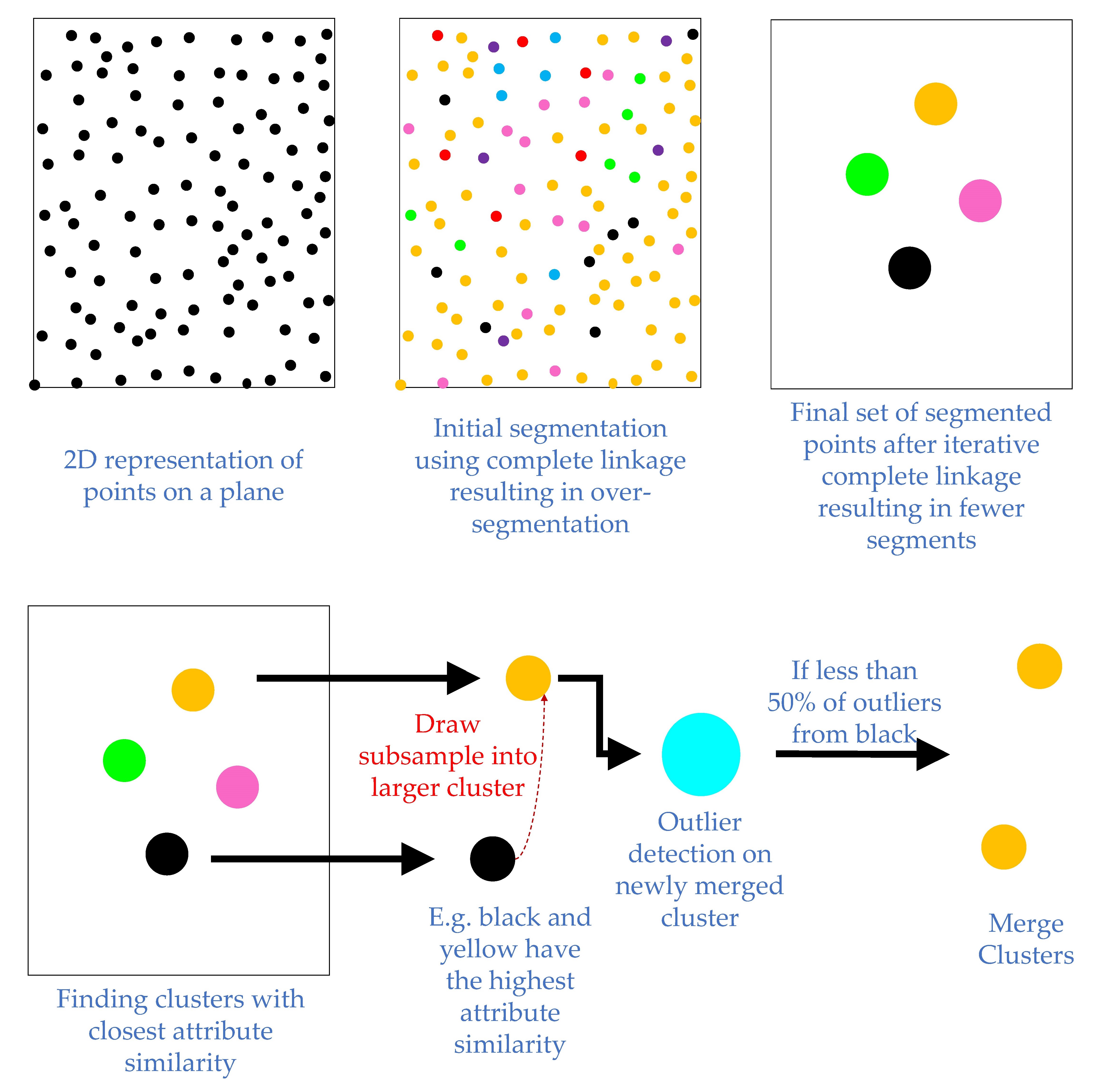 To analyze point clouds using only To analyze point clouds using only geometric primitives, it is necessary to first specify the types of surface geometries, which are required to be automatically extracted. For instance, planar, and cylindrical surfaces are common analytical geometries, which characterize many construction site elements, such as columns, slabs, and pipes. Once the required class of surface geometry is specified, the process then typically involves the classification of points into the defined class (e.g., all points which are planar). The classified points are further sub-categorized so as to group together (segmented) points of the same surface through some attribute similarity (e.g., all points that belong to one planar surface). The attributes can be estimated through various means such as local curvature analysis and robust least-squares surface fitting. The grouping of the points can also be carried out through region growing from a seed point, clustering, or a combination of these methods (hybrid). These segmentation strategies have their advantages and disadvantages. For instance, region growing methods are generally not permutation invariant, and are susceptible to the chaining effect (impacted by scale of the surface). Clustering methods, on the other hand, require scale-invariant attributes as well as scene invariant thresholds for grouping points with similar attributes. The image on the left schematically shows one successful process for robust and scene-invariant merging of clusters (Maalek et. al 2018).
To analyze point clouds using only To analyze point clouds using only geometric primitives, it is necessary to first specify the types of surface geometries, which are required to be automatically extracted. For instance, planar, and cylindrical surfaces are common analytical geometries, which characterize many construction site elements, such as columns, slabs, and pipes. Once the required class of surface geometry is specified, the process then typically involves the classification of points into the defined class (e.g., all points which are planar). The classified points are further sub-categorized so as to group together (segmented) points of the same surface through some attribute similarity (e.g., all points that belong to one planar surface). The attributes can be estimated through various means such as local curvature analysis and robust least-squares surface fitting. The grouping of the points can also be carried out through region growing from a seed point, clustering, or a combination of these methods (hybrid). These segmentation strategies have their advantages and disadvantages. For instance, region growing methods are generally not permutation invariant, and are susceptible to the chaining effect (impacted by scale of the surface). Clustering methods, on the other hand, require scale-invariant attributes as well as scene invariant thresholds for grouping points with similar attributes. The image on the left schematically shows one successful process for robust and scene-invariant merging of clusters (Maalek et. al 2018).