
UWB-RTLS Architecture:
Due to the dynamic and ever-changing construction site conditions, radio frequency (RF)-based RTLS technologies are generally favored over the laser-based or ultrasound-based distance measurement systems due to their ability to penetrate through walls and objects. Amongst various RF-based technologies and standards, such as WLAN, ZigBee, GPS, and Ultra-wide Band (UWB), UWB is expected to produce more accurate location estimation due to larger (wider) frequency bandwidth. This larger bandwidth allows for the differentiation between the line-of-sight (LOS) signal (the direct signal between the tag and the receiver), and the multipath signals (signals which are reflected off the surrounding surfaces), which in turn will provide better opportunities for more accurate location estimation.
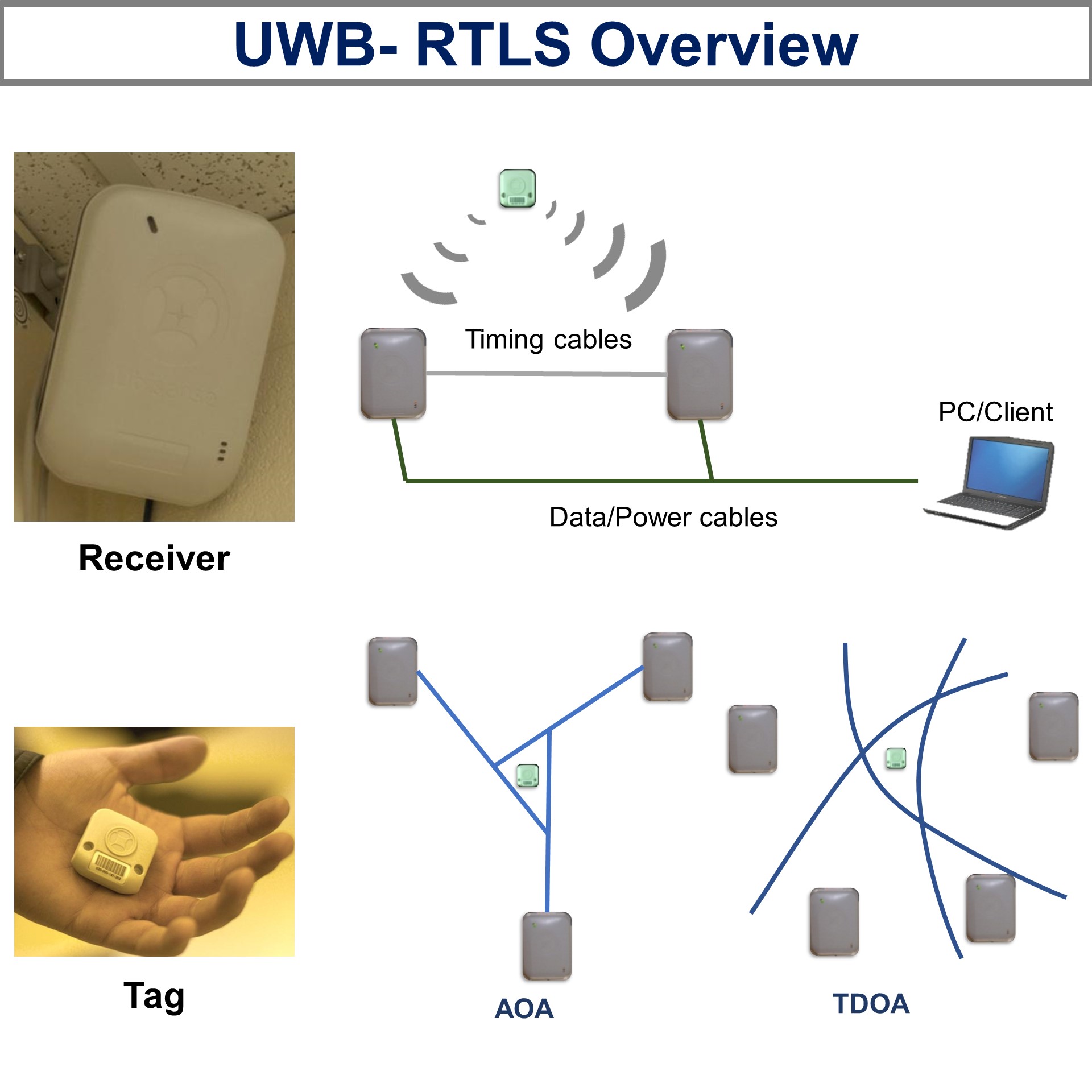 RF-based RTLS typically consists of small tags, which will be attached to objects (in our case construction equipment and laborers), and receivers, which are typically attached at pre-surveyed locations on-site (except for the case of GPS where receivers communicate with orbiting satellites). The tags communicate with the receivers, which then collects relevant data (e.g., time of arrival (TOA) or angle of arrival (AOA) of the LOS signal) for location estimation. When the signal emitted from the tag reaches the minimum required number of receivers, the location of the tag can be estimated. The minimum number of receivers depends on the type of LOS data, which the receivers collect from the tag. For instance, TOA and AOA require three and two receivers, respectively, to estimate the 3-D cartesian coordinates of the tag relative to the coordinate system of the receivers.
RF-based RTLS typically consists of small tags, which will be attached to objects (in our case construction equipment and laborers), and receivers, which are typically attached at pre-surveyed locations on-site (except for the case of GPS where receivers communicate with orbiting satellites). The tags communicate with the receivers, which then collects relevant data (e.g., time of arrival (TOA) or angle of arrival (AOA) of the LOS signal) for location estimation. When the signal emitted from the tag reaches the minimum required number of receivers, the location of the tag can be estimated. The minimum number of receivers depends on the type of LOS data, which the receivers collect from the tag. For instance, TOA and AOA require three and two receivers, respectively, to estimate the 3-D cartesian coordinates of the tag relative to the coordinate system of the receivers.