
Manipulatorgesteuertes Freimessen von Oberflächen (MAFRO)
- Ansprechperson:
- Förderung:
Bundesministerium für Bildung und Forschung
Ausgangslage
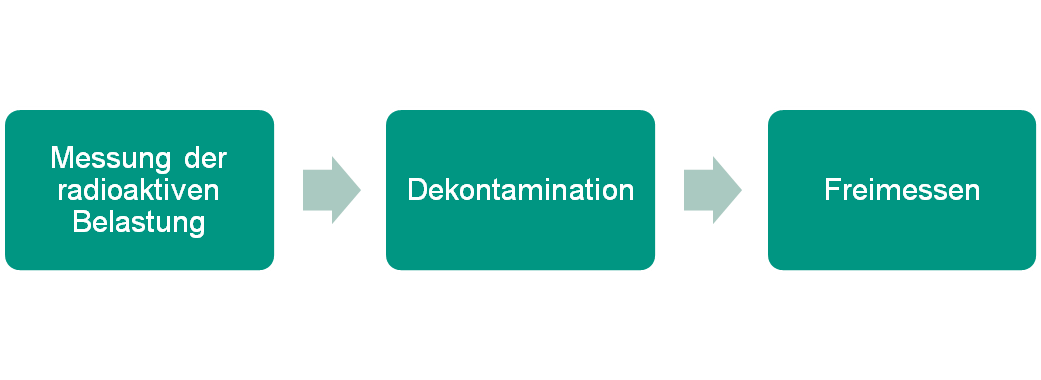
- Ablauf bei der Dekontamination (verfahrenstechnische Kette)
- Messung der radioaktiven Belastung der Oberfläche
- Dekontamination
- Messung, um die Oberfläche nach §29 StrlSchV freigeben zu können
- Derzeit existiert kein ganzheitliches System, mit dem die oben aufgeführten Arbeitsschritte 1) bis 3) durchgeführt werden können
- Durch Ausstattung des Trägergerätes MANOLA mit einem Detektorkopf – in Zusammenhang mit einem Schnellkuppelsystem für den Laserbearbeitungskopf als weiteres Anbaugerät – soll die verfahrenstechnische Kette bei der Dekontamination geschlossen werden
- Kooperation zwischen dem Institut für Technologie und Management im Baubetrieb (TMB) und dem Institut für Prozessrechentechnik, Automation und Robotik (IPR)
Ziel
- Entwicklung eines autonomen bzw. fernhantierbaren Gesamtsystems zur Realisierung der Einzel-Arbeitsschritte beim Dekontaminieren
- "Schließen" der verfahrenstechnischen Kette, bestehend aus Messen, Dekontamination und nochmaligem Messen
Arbeitsprogramm

- Entwicklung eines neuartigen Detektorkopfes und Implementierung am Manipulator
- Automatisierte Datenaufnahme und Datenverarbeitung am Detektorkopf
- Universelle Messplattenausbildung und Kinematik am Detektorkopf
- Implementierung eines 3D-Scanners auf dem Transportsystem
- Umweltmodellgenerierung / Lokalisierung des Manipulators durch den 3D-Scanner
- Autonome Bahnplanung des Manipulators mittels Navigations-Algorithmen
- Evaluation der entwickelten Algorithmen und Techniken an einem Testfeld