
Manipulator Operated Release Measurement of Surfaces (MAFRO)
- Contact:
- Funding:
Federal Ministry of Education and Research
Initial Situation
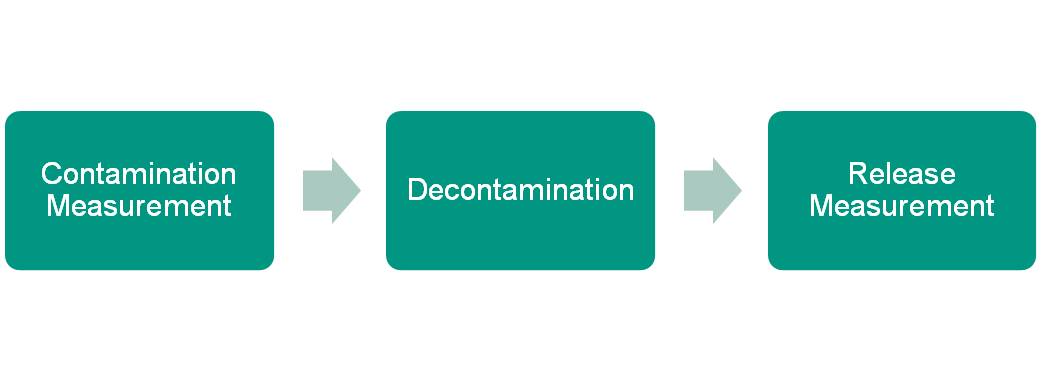
- Decontamination progress (process chain)
- Measurement of radioactive surface contamination
- Decontamination
- Release measurement
- Currently there is no comprehensive system for the above steps 1) to 3) available
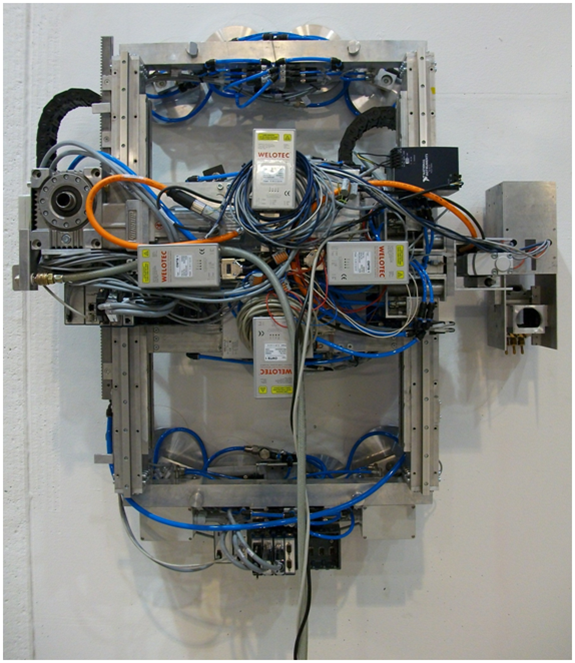
- Supplying the carrier device of MANOLA with a detector head – in connection with a quick coupling system for the laser processing head as an additional attachment – closes the process chain for decontamination
- There are no remote-controlled systems for surface measurement / release measurement available
- Cooperation between the Institute for Technology and Management in Construction (TMB) and the Institute for Process Control and Robotics (IPR)
Goals of research project
- Development of a single system for surface ablation and measurement tasks (consisting of contamination measurement, decontamination, and release measurement
- Development of a comprehensive system for the remote-controlled measurement of surfaces
Work schedule
.JPG)
- Development and implementation of a new detector head on the manipulator
- Automated data recording and processing at the detector head
- Universal measuring disc structure and kinematics of the detector head
- Installation of a 3D scanner on the transport system
- Environmental model generation / location of the manipulator by the 3D scanner
- Autonomous path planning of manipulator using navigation algorithms
- Evaluation of the developed algorithms and techniques in a test field